Для зменшення втрат від помилок, породжуваних несправностями ЕОМ, треба контролювати безпомилковість роботи машини й запобігати поширенню помилки в обчислювальному процесі. З цією метою ЕОМ постачають системою автоматичного контролю правильності роботи машини, яка з появою помилки негайно припиняє обчислення й ініціює роботу засобів автоматичного відновлення обчислювального процесу, а при необхідності й засобів автоматичного діагностування, що локалізують несправність.
Наявність системи автоматичного контролю сприяє збільшенню готовності й обслуговуваності ЕОМ.
Метод діагностування за допомогою схем вбудованого контролю.
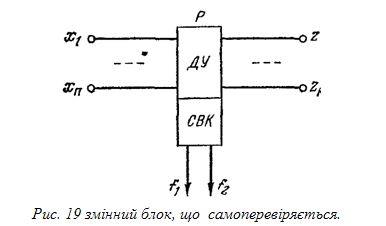
Цей метод характеризується тим, що об’єктом елементарної перевірки є змінний блок, а засобами функціонального діагностування є схеми вбудованого контролю (СВК), конструктивно сполучені з кожним змінним блоком.
На мал. показані пристрій, що діагностується, та схеми вбудованого контролю, які самоперевіряється, разом вони утворюють змінний блок (ЗБ). Найбільша ймовірність правильного діагностування досягається, якщо:
1. ДП(ДУ) повністю перевіряються
2. СВК самоперевіряються.
Ці 2-і вимоги приводять до значних апаратурних витрат, що обмежує застосовність даного методу пристроями, реалізованими в основному на великих інтегральних мікросхемах.
Діагностований пристрій повністю перевіряється, якщо будь-яка його несправність заданого класу виявляється СВК у момент її першого прояву на вихідних пристроях.
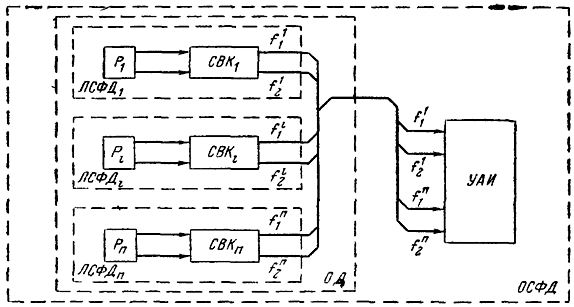
Рис 20 Структура системи діагностування, що використає схеми убудованого контролю.
На мал. 20 наведена структура системи функціонального діагностування. Локальними засобами функціонального діагностування ЛЗФД (ЛСФД) є СВК із парами виходів fi1, fi2 (самоперевіряються), додані кожному змінному блоку Бi. Загальним засобом функціонального діагностування ЗЗФД (ОСФД) є пристрій аналізу Й індикації ПАІ (УАИ). Призначенням останнього є:
1. синхронізація сигналів помилок від змінних блоків з урахуванням їх зв’язків,
2. запобігання можливої неоднозначності індикації через поширення сигналів помилок,
3. однозначна індикація несправного блоку.
Достоїнством методу діагностування за допомогою схем вбудованого контролю є практично миттєве діагностування збоїв і відмов, скорочення витрат на локалізацію перемежованих відмов і на розробку діагностичних тестів.
Схеми контролю, що самоперевіряються
Для виявлення несправностей схем контролю застосовують:
1. СХЕМИ КОНТРОЛЮ, ЩО САМОПЕРЕВІРЯЮТЬСЯ;
2. діагностичні засоби перевірки схем контролю.
Схема контролю (СВК) називається такою, що самоперевіряється, якщо вона виявляє не тільки несправності контрольованого пристрою (КП), але також і свої власні.
Схема контролю із двома виходами (f1, f2) самоперевіряється повністю, якщо вона має наступні властивості:
a) самотестування — всі несправності СК із заданого класу проявляються на виходах f1, f2 у вигляді пари сигналів зі значеннями 00 або 11 хоча б при одному з наборів вхідних сигналів з безлічі наборів робочих вхідних сигналів при справному КП;
b) захищеності від несправностей — кожна несправність СВК із заданого класу проявляється на виходах f1 f2 тільки у вигляді пари сигналів зі значеннями 00 або 11.
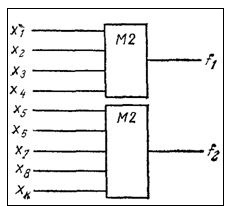 Однією з вимог при побудові схемы контролю, що самоперевіряєься (СКС) є вимога роздільної реалізації функцій f1 і f2, що гарантує, що будь-яка одиночна несправність на входах і виходах СКС не приведе до інвертування сигналів на обох виходах схеми.
Однією з вимог при побудові схемы контролю, що самоперевіряєься (СКС) є вимога роздільної реалізації функцій f1 і f2, що гарантує, що будь-яка одиночна несправність на входах і виходах СКС не приведе до інвертування сигналів на обох виходах схеми.
Значення сигналів 01, 10 на виходах f1, f2 свідчать про правильне функціонування контрольованого пристрою й СКС, а значення 00, 11 – про наявності одиночної несправності в пристрої або СКС.
Схеми контролю, що самоперевіряються. Переривання від схем контролю.
Для фіксації помилок, виявлених засобами контролю передбачається спеціальний реєстр помилок. Поява одиниці в одному з його розрядів викликає передачу керування на аналіз типу помилки, у результаті чого формуються умови переривання від схем контролю.
Залежно від серйозності помилки умови можуть бути терпимими або невідкладними.
Переривання від засобів контролю сповіщає ОС про збої й відмови в апаратурі, а також надає їй відомості про місце й ступінь ушкодження.
Переривання від засобів контролю, викликане терпимими умовами, не припиняє виконання поточної команди й виконується після того, як нормально закінчиться її виконання, і після обробки більше пріоритетних переривань. Переривання від засобів контролю, викликане невідкладними умовами, припиняє виконання поточної команди й скасовує інші переривання.
Інформація про тип помилки й ступінь ушкодження записується в коді переривання від засобів контролю.
Переривання від засобів контролю запускає програми обробки помилок, що входять до складу операційної системи, які на підставі отриманої інформації намагаються відновити обчислювальний процес.